RoboCup SPL
Setup
Running the Robot
Architecture
Perception
Vision
Adaptive Thresholding
Connected Component Analysis (CCA)
Field Feature Detector
Ball Detector
Robot Detector
State Estimation
Behaviour
Motion
Networking
3D Simulation
Tools
Game Preparation
Debugging
Style Guide
Contributing
Working Remotely
Past Research
Code Release / Team Reports
Team Photos
Game Videos
Contact
RoboCup SPL
Perception
Vision
Edit on GitHub
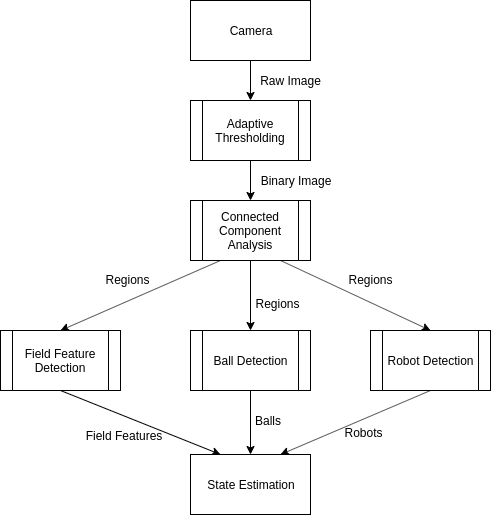
Vision
The basic structure of the vision system is as follows.
Adaptive Thresholding
Connected Component Analysis (CCA)
Field Feature Detector
Ball Detector
Robot Detector