3D Simulation
Overview
Simulation allows for safe, quick testing of experimental code and settings, and can help you practice using the code without having to leave your desk.
- 3D Simulation can be used for developing
Behaviours
Motion
Localisation
Support Tools
- It cannot be used for developing
Vision
Tip
Breaking simulated robots is a lot cheaper than breaking real ones!
Installing Simulator
Run $RUNSWIFT_CHECKOUT_DIR/bin/setup-simulation.sh in a terminal.
Running the Simulator
Running the simulator (RCSSServer3d)
To start the simulation server, in a new terminal, run rcssserver3d
Note
the following errors will show and can be ignored.
(Light) ERROR: OpenGLServer not found
(Light) ERROR: OpenGLServer not found
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(Material2DTexture) ERROR: cannot find TextureServer
(Material2DTexture) ERROR: OpenGLServer not found.
(sparkgui.rb) sparkRegisterMonitorCmdParser TrainerCommandParser
(InputControl) ERROR: no FPSController found at '/usr/scene/camera/physics/controller'
Running the visualiser (RoboViz)
To start the simulator visualier, in a new terminal run roboviz.sh.
A window should pop up, with a soccer field.
Note
If you run into a Exception in thread "main" java.awt.AWTError: Assistive Technology not found: org.GNOME.Accessibility.AtkWrapper you may find this helpful: https://askubuntu.com/a/723503
Runing simswift (single robot)
Run
build-relwithdebinfo-2.1.sh runswiftin a new terminal to compile simswift. It is important to close the server and visualiser, to speed up the compilation. This step can be skipped if no re-compilation is required.Launch robot by running
simswift. Runswift commandline arguments can be used, such assimswift -T 18 -n 1.To kill the robot, use Ctrl+C.
Running simswift (team)
build-relwithdebinfo-2.1.sh runswiftto compile. Skip this step if you don’t have to re-build.sim_runto launch a whole team. This starts five robot agents.sim_kill, to terminate all agents.
Running with Offnao
Run
simswiftin a new terminal. In the terminal, look for the following message and take note of the port numberrUNSWift running in SIMULATION mode. DO NOT RUN THIS ON A NAO. Listening for Offnao on port 10241.Run
offnao, and goFile -> Connect To Nao (Ctrl+N). Enter127.0.0.1in first textbox, and the port number in the second textbox.Click on the first textbox, and press
Enter.Click on the red circle button at the bottom left of the offnao window to start recording.
Tip
The port number is calculated from the team number and player number of the agent.
Speeding up the server
Run
export SPARK_FAST_TIME=truein a new terminal.In the same terminal, run
rcssserver3d. This lets the server run as fast as your CPU can handle.
Tip
Run export SPARK_FAST_TIME=false to disable the speed-up.
How It Works
- 3D Simulation consists of
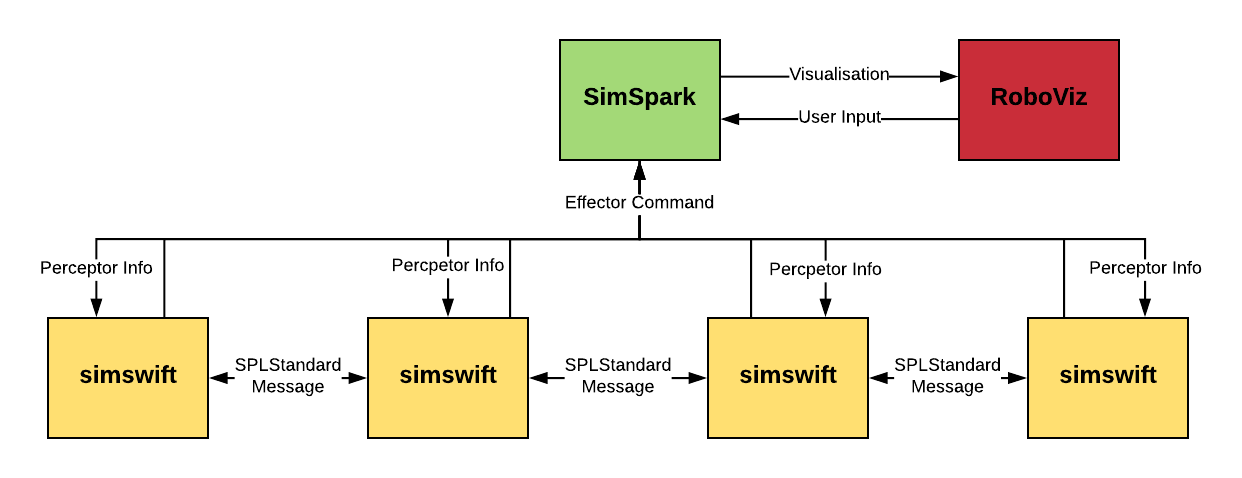
rcssserver3d
3D soccer simulation server running on top of simspark simulation system. Developed by the RoboCup 3D Simulation League. rUNSWift modifications are made in rUNSWift’s fork. More information can be found at Simspark Wiki.
simswift
simswift is the rUNSWift build target on a Linux PC, and is the agent that connects to the simulation server. Refer to Collette’s (2017) thesis for more info.
RoboViz
User-friendly visualiser for the simulator. Provides a graphical interface to interact with the simulator, such as moving the ball and robots. rUNSWift modifications are made in rUNSWift’s fork. More information can be found at magmaOffenburg/RoboViz GitHub.
Making changes
Recompiling changes
SimSpark
To re-compile Spark, run
spark_buildfrom anywhere.To re-compile rcssserver3d, run
rcs_buildfrom anywhere.
Note
spark_build, rcs_build are located in simspark/bin/
Pushing changes
Making changes to SimSpark / RCSS
Gain push access to rUNSWift’s Simspark Fork
Create pull request with a branch with changes.
Making changes to Roboviz
Gain push access to rUNSWift’s RoboViz Fork
Create pull request with a branch with changes.
Note
For GitHub push access, please Contact us.
rUNSWift Modifications
This is a list of what rUNSWift has modified in the SimSpark and RoboViz. This list should be kept up to date so we know what to preserve when incorporating changes made in the original open-source projects.
SimSpark / RCSS Modifications
100FPS
To match the speed of the motion of the SoftBank NAO V5, the simulator’s FPS was changed from 50FPS to 100FPS.
SPARK_FAST_TIME
This is an environment variable that was added to affect multiple settings to allow speed-ups in the simulator
rcssserver3d/bin
rcs_buildandspark_buildscripts were added inrcssserver3d/binfor easy compiling of the simulator.
Disabling Autoref
Autoreffing has been disabled, as it is not needed.
FieldFeatures
A significant modification rUNSWift has made to rcssserver3d, is the addition of “FieldFeatures” (corners, t-junctions, centre circles, etc).
This is a modification to allow the “orientation” of a fieldfeature to be recognised (such as a corner) by the agent in the simulator
To view the list of fieldfeatures refer to
simspark/rcssserver3d/data/rsg/agent/nao/soccer.rsg
RoboViz Modification List
Goal and Penalty Box Size
Goal and Penalty Box Size were modified to meet SPL requirements
Known issues
rcssserver3d will sometimes crash, and keep running in the background. This can happen especially if you disconnect/connect agents very quickly. When this happens, run the following command:
pkill -9 rcssserver3d; rcssserver3dSome movements such as the getup have not been tuned in the simulator.