Offnao¶
Offnao is a tool built in house that collects, saves, restores and streams data from Nao robots. It can record all the data from the robot’s sensors, including either the colour classified or raw camera data. If given the raw camera data Offnao can also run the vision system offline. Offnao also collects information about the internal state of the robot, such as its beliefs about its position, team mate position and ball position, along with what the vision system has detected.
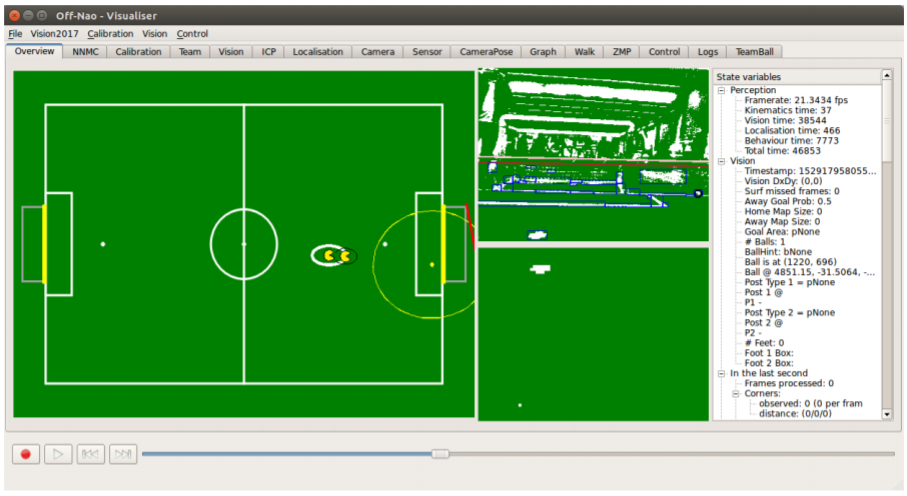
All this information can be displayed through various visualisation methods, including annotated versions of the robot’s camera image and an overhead field view.
Kinematic offsets can be calibrated to compensate for differences in the head mounting and looseness in the robot’s joints. Debug logs recorded by the main code may be viewed. Finally, raw data from the non vision sensors, such as sonar and foot sensors, can be monitored.